小惑星探査機「はやぶさ」発信の遅延回復と電力制御の両立を目指した列車走行試験について
国立研究開発法人宇宙航空研究開発機構(JAXA)、公益財団法人鉄道総合技術研究所(鉄道総研)および東急テクノシステム株式会社(東急テクノシステム)は、列車の遅延回復と小惑星探査機「はやぶさ」の技術に端を発した電力デマンド制御に関わる手法を開発中であり、今回、その基礎検証のため、東京急行電鉄株式会社のご協力のもと、列車走行試験を行いました。
列車運行電力デマンド制御手法
平成27年11月より、JAXA、鉄道総研および東急テクノシステムは、遅延回復と小惑星探査機「はやぶさ」の技術に端を発した列車の電力デマンド制御技術を、鉄道へ応用するための共同研究を行っています。
開発した制御手法は、最終的には、遅延を効率的に回復させる方法の確立を目指しており、それを実現するうえで制約となる電力デマンドを実時間で管理することを可能としています。本手法では、遅延量に応じて列車毎に優先度が設定され、電力デマンドを独立かつ並列に分け合うことで、最も遅延の大きい列車を最優先にダイヤ回復させることができます。
制御方式は、自律分散方式と呼ばれ、これにより、時間帯に応じて列車本数が増減しても、あるいは相互乗り入れ列車が混在しても、同じ手法が適用できます。かつ、双方向通信を必要としないため、導入時の設備投資や通信コストを小さくでき、高速で制御を行うことが可能になります。利便性を落とさず、かつ制約を管理することを両立させることにつながります。電力デマンドを管理することは、発送電設備のスリム化を促し、余剰の社会インフラ維持からの脱却に通ずるものであり、鉄道技術面からも社会貢献できると考えるものです。

図1 試験車両
列車走行試験の目的
効率的な遅延回復を行うことを最終目的とし、制約となりうる電力デマンドを管理できることを実証することを目的としています。その基礎検証として、試験では、電力デマンドが設定した制限値付近に、管理することを確認しました。
列車走行試験の概要
今回、列車走行試験は5月14日、5月21日、5月28日の3日間にわたる深夜の時間帯に、田園都市線の長津田駅~中央林間駅で、図1の試験車両2編成により実施しました。
今回の試験では、各列車がその時点までに影響を与えた電力デマンド量を、力行ノッチオフ速度(力行 から惰行 に移行する速度)を積算して評価をし、その寄与に基づいて総電力デマンドを制御することを試みました。今回は、遅延に応じた優先度の設定については、次回以降に送り、そのための準備段階として、電力デマンドの管理機能を確認しました。
制御を開始すると、変電所から車両の運転台にいるスタッフのタブレットへ、電力デマンド現在値と電力デマンド制限値が、一定間隔で送信されます(図2①)。駅への到着時にスタッフがタブレットのボタンを押すと、次の駅までの力行ノッチオフ速度が自動で計算され、タブレットに表示されます(図2②)。運転士は、指示された力行ノッチオフ速度を守って、次の駅まで運転します(図2③)。
電力デマンド現在値が制限値よりも大きい場合は、指示される力行ノッチオフ速度は通常よりも低くなり、電力デマンドが下がります。
列車走行試験の結果
5月28日の列車走行試験では、通常走行時の約7割の電力デマンド制限値を設定し、試験開始から40分後に列車運行電力デマンド制御を開始しました。
その結果、制御開始時刻から約30分間で、制限値付近まで電力デマンドを下げ、その後の約1時間、電力デマンドを制限値付近で管理できることを実証しました(図3)。
今回の走行試験により、最も遅れている列車の遅延を最優先に回復させる、遅延回復制御を行う準備は完了したと考えており、利便性と電力管理の両立がはかれるめどを得ました。
次回以降の試験にて、今回確認した電力制御と、最終目的である遅延回復制御とを、同時に実証する予定です。
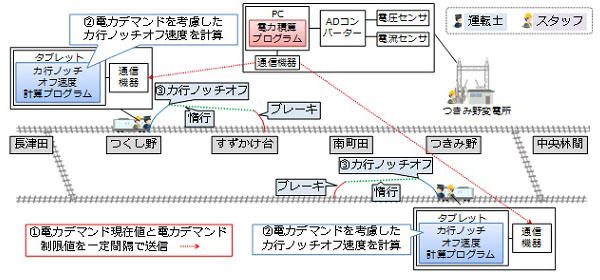
図2 列車走行試験における列車運行電力デマンド制御の手順
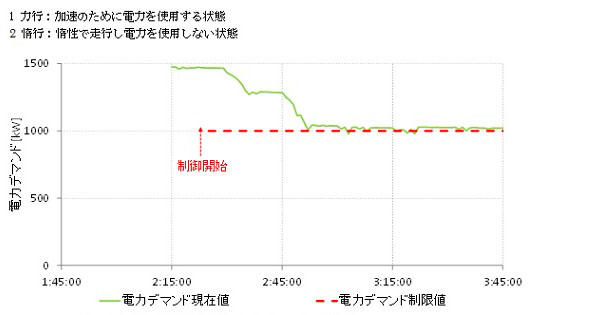
図3 列車走行試験結果:電力デマンドの推移
以上
本件に関するお問い合わせ先
電力制御について
宇宙航空研究開発機構 シニアフェロー室 TEL:050-3362-3960
列車走行試験について
公益財団法人鉄道総合技術研究所総務部 広報 TEL:042-573-7219
試験線区・試験車両について
東急テクノシステム(株)成長戦略推進室 TEL:044-733-4368